The mechanical design of a ME210 robot is a whirlwind. It must be completed quickly in order for other systems to be tested, and yet it also must be robust and functional. On this page you'll find descriptions of the different mechanical subsystems of Hot Wheels, and CAD files of the design.

Design and MaterialsThe base of Hot-Wheels was designed in Solidworks, for construction with 0.25" acrylic. We chose acrylic for its rigidity, and ability to be "welded" with acrylic cement (as opposed to chunky hot glue). We later remade the drive base of Hot-Wheels in duron due to sloppy tolerances on the first acrylic version (and lack of more acrylic with which to make a second). The robot design relied heavily on tab construction for alignment and strength.
|

MotorsWe chose to use two of the VEX 393 motors offered in the lab. These offer 100RPM no load speeds, and a stall torque of 1.67Nm. A motor speed of RPM would move Hot-Wheels at 7.35in/sec. This was adequately quick to succeed in a competition, but slow and enough to be controllable for line following. We were not overly concerned with torque limitations on a flat playing field.
|
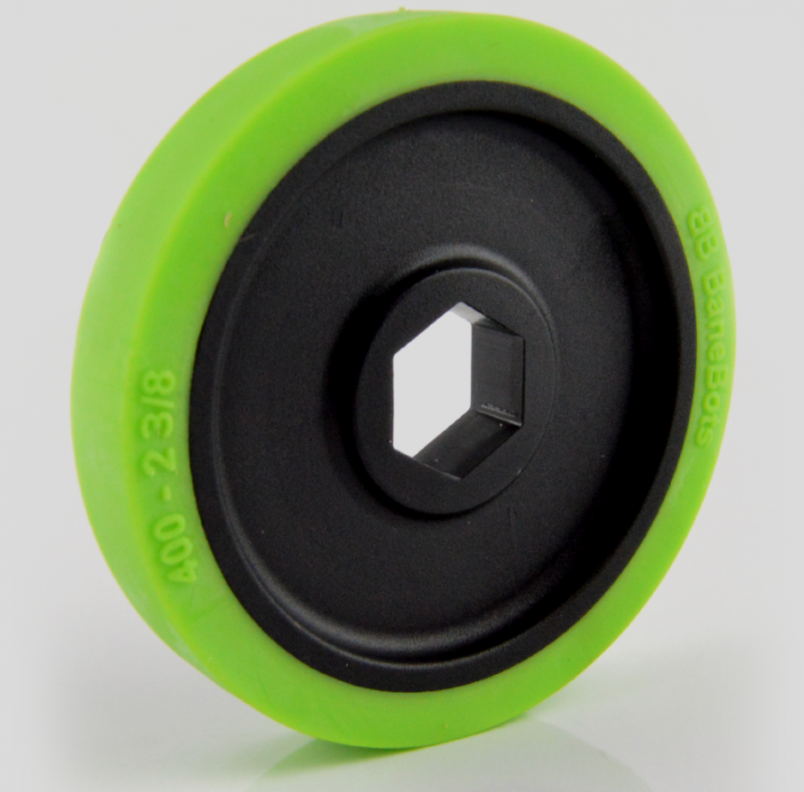
Wheels and Drive-TrainEarly in our design process, we decided to use two 2.375" diameter bane-bot wheels. In retrospect, this was a poor decision, since the vex wheels were meant for half inch hex shafts. To make these work with our 0.125" motor shafts, we needed two adapters, which each added slop to the system. The hot glue we used to reduce slop added enough friction that we added motor offset constant in our code.
|
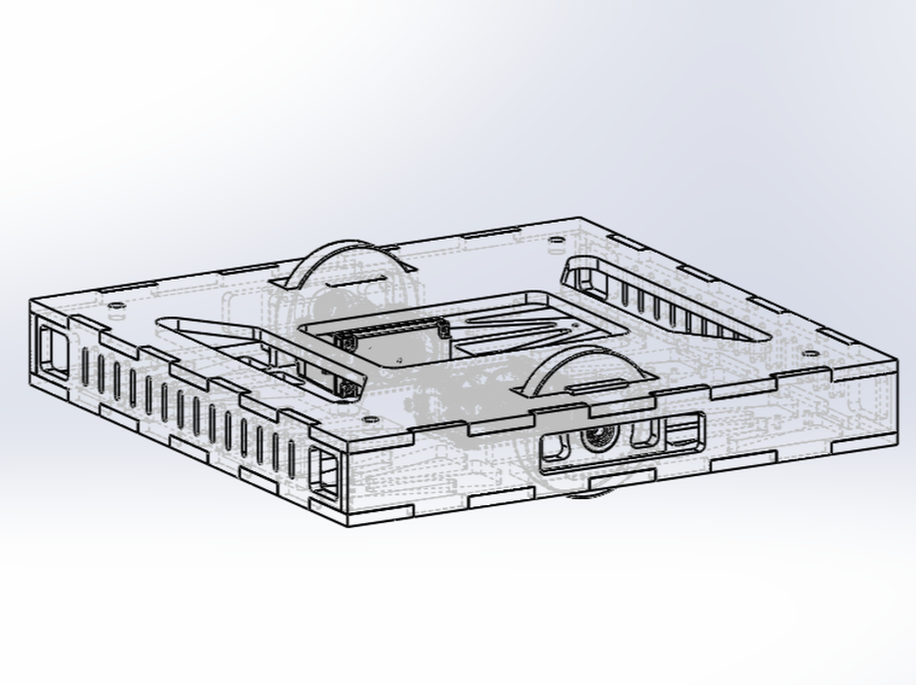
Drive BaseThe drive base for hot-wheels was designed to maximally constrain the two VEX motors, and provide support for the wheel axles. We used two bearings for each shaft, so as to avoid single-shear loads. The drive base also provides the line sensors with secure mounting locations. This was helpful since we found the sensors to be very sensitive to distance from the floor.
|
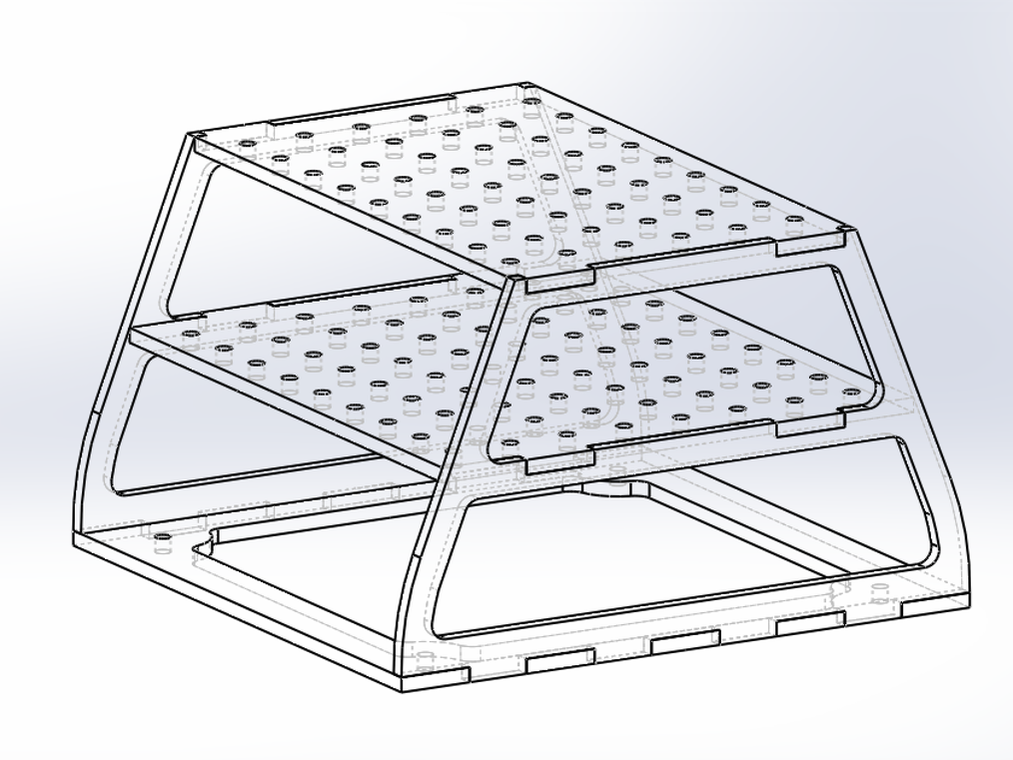
Electronics Platform Instead of threaded rods, Hot-Wheels features a modular, acrylic, electronics mounting platform. This design requires less adjustment than threaded rods, and gives Hot-Wheels a distinctive trapezoidal shape. (At least three quarters of our design meeting was spent trying to draw a trapezoid). The mounting platforms have a hole pattern to facilitate modular ball dispensing mechanisms.
|
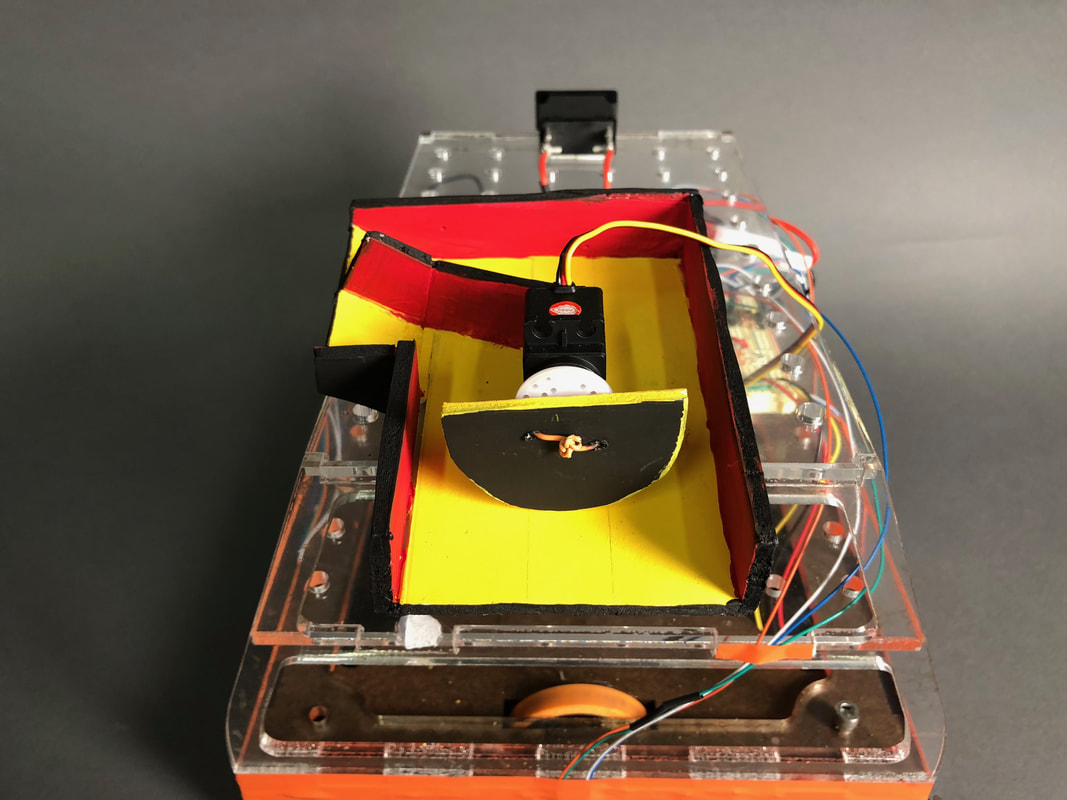
Ball DispenserThe ball dispenser was constructed with foam-core and a single servo. It used a semi-circle shaped gate to dispense balls from either of two tracks and used a timer to control the number of balls dropped. The dispenser was also lovingly painted.
|
| drive_base.zip |
| sensor_platform.zip |
